| El objetivo principal del proyecto es el de desarrollar y experimentar técnicas de percepción distribuida mediante la integración de cámaras multiespectrales y redes de sensores. Las cámaras multiespectrales permiten observar propiedades de los objetos que no se pueden obtener mediante una sola banda espectral. Las redes de sensores de rango distribuidas permiten obtener información espacial con gran precisión y se pueden utilizar para reducir la incertidumbre de localización. El equipo solicitante lo forman investigadores pertenecientes al Grupo “Robótica Visión y Control”, ESI-USevilla, al Grupo “Ingeniería de Sistemas y Automática”, ETSII-U.Málaga. Los miembros de los grupos seleccionados en el equipo solicitante se complementan aportando experiencia en las áreas de conocimiento del proyecto, según se muestra esquemáticamente en la siguiente tabla:
Al equipo solicitante también pertenecen profesores del Depto. de Matemáticas de la Univ. de Huelva. Su contribución se centra en la optimización de la localización de sensores distribuidos para percepción 3D y en el desarrollo de métodos dinámicos de optimización de la gestión del tráfico. Los grupos involucrados tienen relevante experiencia nacional e internacional en todas las áreas involucradas en el proyecto: Sistemas de visión multiespectral Los sistemas de visión multiespectrales combinan las bandas espectrales aprovechando las sinergias entre ellas para obtener percepciones mejores y más completas que cada una de las percepciones de forma independiente e, incluso, que la suma de las percepciones individuales. Los miembros del equipo solicitante han participado en el proyecto COMETS del V Programa Marco de la Comisión Europea. En dicho proyecto desarrollaron técnicas de percepción cooperativa para detección, seguimiento y monitorización, así como para la realización de mapas mediante cámaras visuales y de infrarrojos y otros sensores a bordo de robots aéreos. El sistema completo y las técnicas y funciones de percepción se demostraron experimentalmente aplicándolas a la de detección y monitorización cooperativas de incendios. Cabe también destacar la experiencia del equipo solicitante en el diseño, desarrollo y experimentación de sistemas de percepción que integran cámaras visuales y de infrarrojos para entornos naturales no estructurados. Los miembros del equipo solicitante han participado en el proyecto Europeo DEDICS del Cuarto Programa Marco de la Comunidad Europea, en el que se desarrolló un sistema de fusión sensorial para detección temprana de desastres. El sistema integraba resultados procedentes de procesamiento de imágenes de infrarrojos e imágenes visuales y otros datos espaciales como información del terreno extraídos de Sistemas de Información Geográfica (SIG). El sistema fue demostrado para detección temprana de incendios forestales de alta fiabilidad durante el verano de 1998 en el Parque Nacional de Los Alcornocales (Cádiz). El equipo solicitante también tiene amplia experiencia en el desarrollo y experimentación de sistemas de percepción multiespectral para monitorización y medición en aplicaciones en entornos exteriores. En el marco de los proyectos INFLAME, SPREAD y EUFIRELAB de diversos Programas Marco de la de la Comunidad Europea el equipo solicitante ha desarrollado técnicas y sistemas de percepción con múltiples cámaras (visuales y de infrarrojo en banda del infrarrojo medio y lejano) para monitorización y medición en tiempo real de incendios forestales. El equipo solicitante tiene amplia experiencia en el desarrollo de sistemas y técnicas de percepción basados en imágenes visuales y de infrarrojos. Ha participado en diversos proyectos, tales como “Nuevas técnicas de percepción para detección y seguimiento empleando cámaras infrarrojos y visuales”, financiado por la Comisión Interministerial de Ciencia y Tecnología (CICYT) (FEDER. 1FD97-0566). Se desarrollaron técnicas de percepción multiespectral empleando cámaras de infrarrojos en dos bandas del infrarrojo (medio y lejano). El grupo tiene amplia experiencia en sistemas de visión por computador para exteriores incluyendo sistemas de visión térmica para exteriores para aplicaciones de vigilancia. De entre las aplicaciones en el área de la vigilancia en las que se empleará el equipo solicitado cabe destacar: vigilancia de edificios, detección de intrusión y visión nocturna. El equipo solicitante ha instalado en la azotea del edificio de laboratorios de la Escuela Superior de Ingenieros de Sevilla un sistema posicionador de altas prestaciones con un sistema de visión infrarrojo-visual, donde se han desarrollado un gran número de técnicas de procesamiento de imágenes de infrarrojos y visuales con aplicación a la vigilancia. 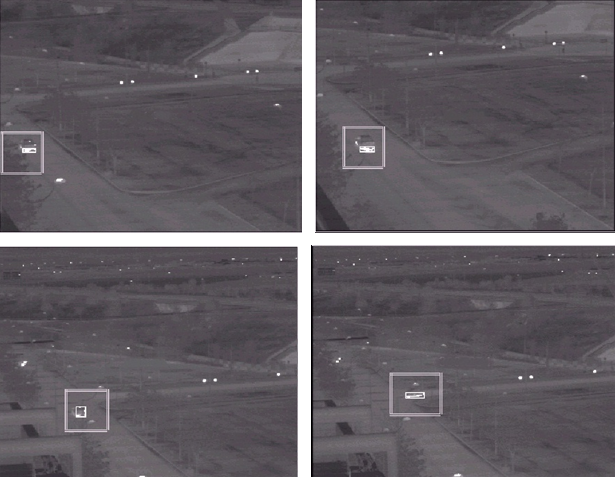 Seguimiendo de
vehículos con
cámaras de infrarrojos (Proyecto "Nuevas técnicas de
percepción para detección y seguimiento empleando
cámaras infrarrojos y visuales")
Redes de sensores distribuidos Constituyen un área tecnológica en expansión con grandes posibilidades de aplicación. La idea consiste en desplegar un conjunto de sensores con cierta capacidad de cálculo (nodos) en número suficientemente elevado comunicados entre sí. Los nodos suelen ser de bajo coste, bajo consumo energético, pequeño tamaño y con protección para trabajar en condiciones adversas. Las redes de sensores tienen propiedades de escalabilidad, tolerancia a fallos de sensores y capacidad de topología adaptable con posibilidad de configuración, edición e inserción de nodos automáticas, manteniendo también la posibilidad de configuración manual. Los nodos de la red pueden ser equipados con una creciente variedad de sensores incluyendo sensores de luminosidad, sensores de rango, sensores de presencia e incluso pequeñas cámaras de baja resolución, pero que permiten distinguir colores y detectar movimiento. En el proyecto solicitado se desarrollan sistemas y técnicas basados en nodos estáticos para detectar, seguir y extraer características de los objetos móviles. También se desarrollan sistemas y técnicas basadas en el empleo de nodos portados por personas o instalados en vehículos. Los miembros del equipo solicitante forman parte del equipo coordinador del proyecto AWARE del VI Programa Marco de la Comisión Europea. Entre los objetivos del proyecto AWARE está el desarrollo de técnicas y sistemas de percepción para integrar redes de sensores inalámbricas con múltiples Vehículos aéreos no tripulados (UAVs) dotados de cámaras y otros sensores. El equipo solicitante también desarrolla técnicas de percepción cooperativa basadas en cámaras visuales y de infrarrojos estáticas e instaladas en robots aéreos y datos procedentes de redes de sensores distribuidos. El sistema será demostrado en aplicaciones para incendios urbanos y cinematografía. Los miembros del equipo solicitante han participado en el recientemente concluido proyecto AEROSENS del Plan Nacional. Su objetivo es desarrollar un sistema basado en el empleo de robots móviles aéreos y terrestres y redes de sensores para la percepción cooperativa. El sistema se basa en la aplicación conjunta de la robótica aérea y la tecnología de las redes de sensores con nodos móviles. 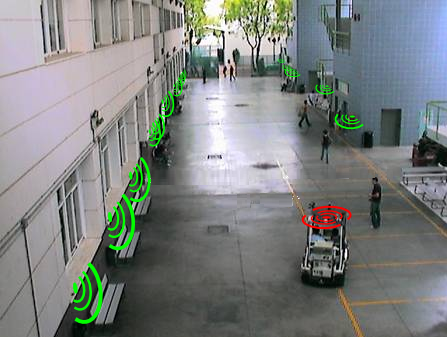 Nodos desplegados en
un escenario de monitorización (proyecto AEROSENS)
Los miembros del equipo solicitante han participado en la Acción Coordinada del Sexto Programa Marco de la Comunidad Europea “Embedded Wisents” dedicado a las redes de sensores y objetos cooperativos. En esta red han liderado el paquete de trabajo sobre “Road Map”, en el que se ha preparado una hoja de ruta donde se pone de manifiesto el relevante papel que pueden jugar en el futuro las redes de nodos móviles. |
