Indoor Data sets

Aerial manipulation
FADA-CATEC indoor testbed - 125s 
In this data set, range-only sensors are embedded in a set of bars to be manipulated by the aerial robot. This data set was recorded in FADA-CATEC indoor testbed (Seville, Spain) under the framework of the ARCAS project. The data set also uses static range-only sensors placed around the testbed to have a good trilateration of robot 3D position. The data set also includes barometric altitimeter measurements and the ground truth estimated with a VICON tracking system.
Info Video DownloadData set content
Authors: Felipe R.Fabresse and Fernando Caballero (Grupo Robotica, Vision y Control - University of Seville) License: CC BY-SA
ROS bag file: arcas.bag
Date: Jan 29 2014
Duration: 2:05s (125s)
Size: 23.3MB
Messages: 63952
Topics and messages type:
- Barometric altimeter: Topic: /mav/pressure_height_filtered Type: mav_msgs/Height Num.Messages: 2518
- Range-only sensor: Topic: /nanotron/range Type: nanotron_swarm/P2PRange Num.Messages: 8600
- Robot pose (VICON): Topic: /vicon_proxy_receiver/pose Type: geometry_msgs/PoseStamped Num.Messages: 25171
- Robot odometry (VICON): Topic: /vicon_proxy_receiver/odom Type: nav_msgs/Odometry Num.Messages: 25171
- Coordinate frames connections: Topic: /tf Type: tf2_msgs/TFMessage Num.Messages: 2492 (2 connections)
- Robot frame: /base_link
- Range-only sensor: /radio_range
- Altimeter: /imu
- goundtruth_data set.txt: Plain text file with ground truth extracted from bag suitable for its use in Matlab.
- node_poses.txt: Plain text file with range-only sensors ground truth (real position of sensors) suitable for its use in Matlab.
- <topic>.txt: All topics are also exported as plain text files suitable for its use in Matlab. Each column represents a different field of the ROS message type associated to the topic.

Aerial circular exploration
FADA-CATEC indoor testbed - 146s
This data set was recorded in FADA-CATEC indoor testbed (Seville, Spain) for aerial exploration using a circular trayectory. The aerial robot explores a mock-up of an industrial environment. In this case, some range-only sensors are placed in pipes and around the testbed to have a good trilateration of the robot 3D position. The data set also includes barometric altimeter measurements and the ground truth is estimated with a VICON tracking system.
Info Video DownloadData set content
Authors: Felipe R.Fabresse and Fernando Caballero (Grupo Robotica, Vision y Control - University of Seville) License: CC BY-SA
ROS bag file: circular.bag
Date: Jan 29 2014
Duration: 2:26s (146s)
Size: 27.2MB
Messages: 74921
Topics and messages type:
- Barometric altimeter: Topic: /mav/pressure_height_filtered Type: mav_msgs/Height Num.Messages: 2936
- Range-only sensor: Topic: /nanotron/range Type: nanotron_swarm/P2PRange Num.Messages: 10377
- Robot pose (VICON): Topic: /vicon_proxy_receiver/pose Type: geometry_msgs/PoseStamped Num.Messages: 29350
- Robot odometry (VICON): Topic: /vicon_proxy_receiver/odom Type: nav_msgs/Odometry Num.Messages: 29350
- Coordinate frames connections: Topic: /tf Type: tf2_msgs/TFMessage Num.Messages: 2908 (2 connections)
- Robot frame: /base_link
- Range-only sensor: /radio_range
- Altimeter: /imu
- goundtruth_data set.txt: Plain text file with ground truth extracted from bag suitable for its use in Matlab.
- node_poses.txt: Plain text file with range-only sensors ground truth (real position of sensors) suitable for its use in Matlab.
- <topic>.txt: All topics are also exported as plain text files suitable for its use in Matlab. Each column represents a different field of the ROS message type associated to the topic.

Aerial zig-zag exploration
FADA-CATEC indoor testbed - 144s
This data set was recorded in FADA-CATEC indoor testbed (Seville, Spain) for aerial exploration using a zig-zag trayectory. The aerial robot explores a mock-up of an industrial environment. In this case, some range-only sensors are placed in pipes and around the testbed to have a good trilateration of the robot 3D position. The data set also includes barometric altimeter measurements and the ground truth is estimated with a VICON tracking system.
Info Video DownloadData set content
Authors: Felipe R.Fabresse and Fernando Caballero (Grupo Robotica, Vision y Control - University of Seville) License: CC BY-SA
ROS bag file: zigzag.bag
Date: Jan 29 2014
Duration: 2:24s (144s)
Size: 26.8MB
Messages: 73933
Topics and messages type:
- Barometric altimeter: Topic: /mav/pressure_height_filtered Type: mav_msgs/Height Num.Messages: 2903
- Range-only sensor: Topic: /nanotron/range Type: nanotron_swarm/P2PRange Num.Messages: 10154
- Robot pose (VICON): Topic: /vicon_proxy_receiver/pose Type: geometry_msgs/PoseStamped Num.Messages: 28999
- Robot odometry (VICON): Topic: /vicon_proxy_receiver/odom Type: nav_msgs/Odometry Num.Messages: 28999
- Coordinate frames connections: Topic: /tf Type: tf2_msgs/TFMessage Num.Messages: 2878 (2 connections)
- Robot frame: /base_link
- Range-only sensor: /radio_range
- Altimeter: /imu
- goundtruth_data set.txt: Plain text file with ground truth extracted from bag suitable for its use in Matlab.
- node_poses.txt: Plain text file with range-only sensors ground truth (real position of sensors) suitable for its use in Matlab.
- <topic>.txt: All topics are also exported as plain text files suitable for its use in Matlab. Each column represents a different field of the ROS message type associated to the topic.
Outdoor Data sets
Landing with range-only and visual measurements
RC SAETA, Seville - 91s
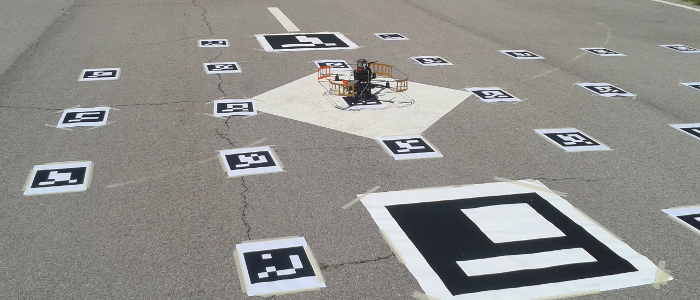
This outdoor data set was recorded in a aeromodelling club saeta near Isla de la Cartuja (Seville, Spain) for aerial robot landing using visual targets, range-only sensors and a barometric altimeter. In this case, some range-only sensors are placed around the scenario for robot localization purposes. The ground truth was estimated using a Diff. GPS.
Info Video DownloadData set content
Authors: Felipe R.Fabresse and Fernando Caballero (Grupo Robotica, Vision y Control - University of Seville) License: CC BY-SA
ROS bag file: landing.bag
Date: Jul 04 2014
Duration: 1:31s (91s)
Size: 128.0MB
Messages: 19409
Topics and messages type:
- Barometric altimeter: Topic: /mav/pressure_height_filtered Type: mav_msgs/Height Num.Messages: 1228
- Range-only sensor: Topic: /nanotron/range Type: nanotron_swarm/P2PRange Num.Messages: 1146
- Camera RGB images: Topic: /logitechnode/image_raw/compressed: sensor_msgs/CompressedImage Num.Messages: 1841
- Camera calibration: Topic: /logitechnode/camera_info: sensor_msgs/CameraInfo Num.Messages: 1838
- Robot pose: Topic: /pose Type: geometry_msgs/PoseStamped Num.Messages: 597
- Robot position (Diff. GPS + EKF): Topic: /rtkekf/gnss_gpsfix_filtered Type: gps_common/GPSFix Num.Messages: 412
- Robot position (Diff. GPS + EKF): Topic: /rtkekf/gnss_navsatfix_filtered Type: sensor_msgs/NavSatFix Num.Messages: 913
- Robot position (Diff. GPS): Topic: /rtkrcv/gnss_gpsfix Type: gps_common/GPSFix Num.Messages: 614
- Robot position (Diff. GPS): Topic: /rtkrcv/gnss_navsatfix Type: sensor_msgs/NavSatFix Num.Messages: 613
- Xsens IMU: Topic: /lse_xsens_mti/xsens/imu/data Type: sensor_msgs/Imu Num.Messages: 6138
- Coordinate frames connections: Topic: /tf Type: tf/tfMessage Num.Messages: 4069 (5 connections)
- Robot frame: /base_link
- Range-only sensor: /radio_range
- Camera: /base_camera
- GPS robot antenna: /antenna
- Xsens IMU: /base_xsens
- Altimeter: /imu
- goundtruth_data set.txt: Plain text with ground truth extracted from bag suitable for its use in Matlab.
- node_poses.txt: Plain text with range-only sensors ground truth (real position of sensors) suitable for its use in Matlab.
- marker_poses.txt: Plain text with visual markers ground truth (real position of markers) suitable for its use in Matlab.
- <topic>.txt: All topics are also exported as plain text files suitable for its use in Matlab. Each column represents a different field of the ROS message type associated to the topic.
- images folder: This folder contains all jpeg images exported from /logitechnode/image_raw/compressed (data field) topic.
Aerial trilateration of beacons
RC SAETA, Seville - 318s
This outdoor data set was recorded in SAETA aeromodelling club near Isla de la Cartuja (Seville, Spain) for aerial mapping of a set of beacons. In this case, some range-only sensors are placed around the scenario for the trilateration of the robot and others for mapping. The data set also includes barometric altitimeter measurements and RGB images with markers. The ground truth was estimated using a Diff. GPS.
Info Video DownloadData set content
Authors: Felipe R.Fabresse and Fernando Caballero (Grupo Robotica, Vision y Control - University of Seville) License: CC BY-SA
ROS bag file: mapping.bag
Date: Jul 04 2014
Duration: 5:18s (318s)
Size: 515.9MB
Messages: 90213
Topics and messages type:
- Barometric altimeter: Topic: /mav/pressure_height_filtered Type: mav_msgs/Height Num.Messages: 5772
- Range-only sensor: Topic: /nanotron/range Type: nanotron_swarm/P2PRange Num.Messages: 8370
- Camera RGB images: Topic: /logitechnode/image_raw/compressed: sensor_msgs/CompressedImage Num.Messages: 8666
- Camera calibration: Topic: /logitechnode/camera_info: sensor_msgs/CameraInfo Num.Messages: 8666
- Robot pose: Topic: /pose Type: geometry_msgs/PoseStamped Num.Messages: 2789
- Robot position (Diff. GPS + EKF): Topic: /rtkekf/gnss_gpsfix_filtered Type: gps_common/GPSFix Num.Messages: 2687
- Robot position (Diff. GPS + EKF): Topic: /rtkekf/gnss_navsatfix_filtered Type: sensor_msgs/NavSatFix Num.Messages: 3189
- Robot position (Diff. GPS): Topic: /rtkrcv/gnss_gpsfix Type: gps_common/GPSFix Num.Messages: 2889
- Robot position (Diff. GPS): Topic: /rtkrcv/gnss_navsatfix Type: sensor_msgs/NavSatFix Num.Messages: 2888
- Xsens IMU: Topic: /lse_xsens_mti/xsens/imu/data Type: sensor_msgs/Imu Num.Messages: 28884
- Coordinate frames connections: Topic: /tf Type: tf/tfMessage Num.Messages: 15413 (5 connections)
- Robot frame: /base_link
- Range-only sensor: /radio_range
- Camera: /base_camera
- GPS robot antenna: /antenna
- Xsens IMU: /base_xsens
- Altimeter: /imu
- goundtruth_data set.txt: Plain text with ground truth extracted from bag suitable for its use in Matlab.
- node_poses.txt: Plain text with range-only sensors ground truth (real position of sensors) suitable for its use in Matlab.
- marker_poses.txt: Plain text with visual markers ground truth (real position of markers) suitable for its use in Matlab.
- <topic>.txt: All topics are also exported as plain text files suitable for its use in Matlab. Each column represents a different field of the ROS message type associated to the topic.
- images folder: This folder contains all jpeg images exported from /logitechnode/image_raw/compressed (data field) topic.

Aerial mapping and landing area recognition
RC SAETA, Seville - 304s
This outdoor data set was recorded in a aeromodelling club near Isla de la Cartuja (Seville, Spain) for aerial exploration. This data set can be used for flat landing area detection and mapping of beacons. The data set also includes barometric altitimeter measurements and RGB images for target detection and localization. The ground truth was estimated using a Diff. GPS.
Info Video DownloadData set content
Authors: Felipe R.Fabresse and Fernando Caballero (Grupo Robotica, Vision y Control - University of Seville) License: CC BY-SA
ROS bag file: exploration_near.bag
Date: Jul 04 2014
Duration: 5:04s (304s)
Size: 522.2MB
Messages: 85159
Topics and messages type:
- Barometric altimeter: Topic: /mav/pressure_height_filtered Type: mav_msgs/Height Num.Messages: 5485
- Range-only sensor: Topic: /nanotron/range Type: nanotron_swarm/P2PRange Num.Messages: 7358
- Camera RGB images: Topic: /logitechnode/image_raw/compressed: sensor_msgs/CompressedImage Num.Messages: 8228
- Camera calibration: Topic: /logitechnode/camera_info: sensor_msgs/CameraInfo Num.Messages: 8228
- Robot pose: Topic: /pose Type: geometry_msgs/PoseStamped Num.Messages: 2677
- Robot position (Diff. GPS + EKF): Topic: /rtkekf/gnss_gpsfix_filtered Type: gps_common/GPSFix Num.Messages: 2541
- Robot position (Diff. GPS + EKF): Topic: /rtkekf/gnss_navsatfix_filtered Type: sensor_msgs/NavSatFix Num.Messages: 3044
- Robot position (Diff. GPS): Topic: /rtkrcv/gnss_gpsfix Type: gps_common/GPSFix Num.Messages: 2744
- Robot position (Diff. GPS): Topic: /rtkrcv/gnss_navsatfix Type: sensor_msgs/NavSatFix Num.Messages: 2743
- Xsens IMU: Topic: /lse_xsens_mti/xsens/imu/data Type: sensor_msgs/Imu Num.Messages: 27426
- Coordinate frames connections: Topic: /tf Type: tf/tfMessage Num.Messages: 14685 (5 connections)
- Robot frame: /base_link
- Range-only sensor: /radio_range
- Camera: /base_camera
- GPS robot antenna: /antenna
- Xsens IMU: /base_xsens
- Altimeter: /imu
- goundtruth_data set.txt: Plain text with ground truth extracted from bag suitable for its use in Matlab.
- node_poses.txt: Plain text with range-only sensors ground truth (real position of sensors) suitable for its use in Matlab.
- marker_poses.txt: Plain text with visual markers ground truth (real position of markers) suitable for its use in Matlab.
- <topic>.txt: All topics are also exported as plain text files suitable for its use in Matlab. Each column represents a different field of the ROS message type associated to the topic.
- images folder: This folder contains all jpeg images exported from /logitechnode/image_raw/compressed (data field) topic.