| APLICACIONES |
Teniendo en cuenta la experiencia en programas de investigación de la Comisión Europea y del Plan Nacional, se ha considerado que el problema debe estar enmarcado en un escenario de aplicación. Este escenario permitirá identificar con facilidad las misiones y el hardware/software necesario. Además, un buen escenario facilita las tareas necesarias para futuras transferencias de tecnologías a empresas.
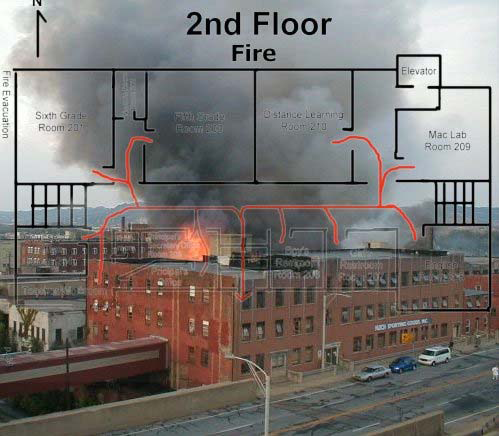
En proyectos anteriores, el grupo de investigación ha considerado escenarios con fuegos forestales, lo cual ha permitido el desarrollo de herramientas para la detección y la monitorización de incendios forestales. En este proyecto se considera la aplicación a la gestión de desastres y protección civil en entornos urbanos e industriales, en los cuales se involucran requerimientos mayores en lo que respecta a la de seguridad y fiabilidad necesarias para la aplicación de la Robótica Aérea. El escenario puede ilustrarse en las Figuras 1 y 2.
|
|
| Figura 1. Control de desastres en entornos urbanos: detalles. |
|
|
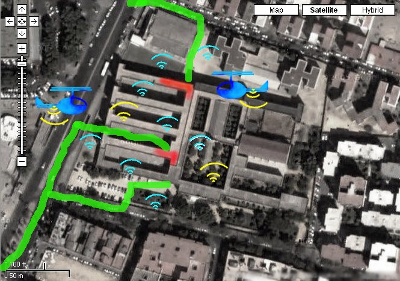
| Figura 2. Control de desastres en entornos urbanos: Vista general. |
En concreto, se llevarán a cabo estudios relacionados con tareas de monitorización en estos escenarios, lo cual implica no solo la consideración del fuego, sino también el estudio de la evolución del humo y la presencia de gases tóxicos. Los sensores estarán integrados en los UAVs, y en tierra, incluyendo aquí sensores estáticos y sensores transportados por los bomberos o los vehículos de protección civil. Por otro lado, el grupo de investigación posee experiencia en la inspección de edificios utilizando UAVs gracias al proyecto Helinspec en el cual se desarrollaron nuevas tecnologías en la inspección térmica Sensor nodes Planned paths Emergencies spots Comms equipment de edificios utilizando cámaras infrarrojas. Las figuras 3 y 4 muestra algunos de los experimentos con el helicóptero HERO 2.
 Figura 3. Helicóptero HERO 2 en un vuelo de inspección, |
 |
 |
 |
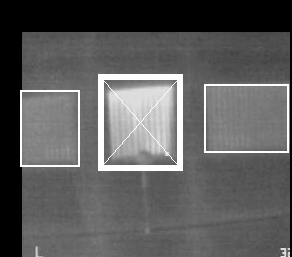 |
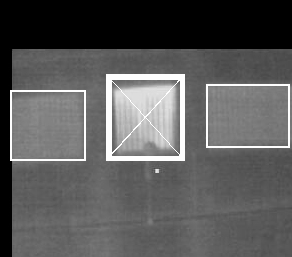
| Figura 4. (Arriba): imágenes infrarrojas tomadas por la cámara a bordo, (abajo): detección automática de pérdidas térmicas después de estabilizar, segmentar y localizar las zonas con pérdidas. | |
En el proyecto Helinspec se puso de manifiesto el interés de la Robótica Aérea para aplicaciones de inspección en entornos urbanos, pero también el alto riesgo que podía suponer el llevar a cabo dichas inspecciones sin los protocolos de seguridad y fiabilidad necesarios debido a que el vuelo autónomo en áreas urbanas impone serias restricciones en lo que a posicionamiento y evitación de obstáculos se refiere. Así, en este proyecto, se ha considerado la inspección de monumentos y edificios de gran valor arquitectónico, poniendo énfasis en la seguridad y la fiabilidad requeridas. Es importante señalar que la labor de inspección se llevará a cabo utilizando, además de los sensores embarcados en el UAV, otros sensores (humedad, temperatura, gases,…) instalados cerca o sobre el objeto a inspeccionar.