aéreos y terrestres



|
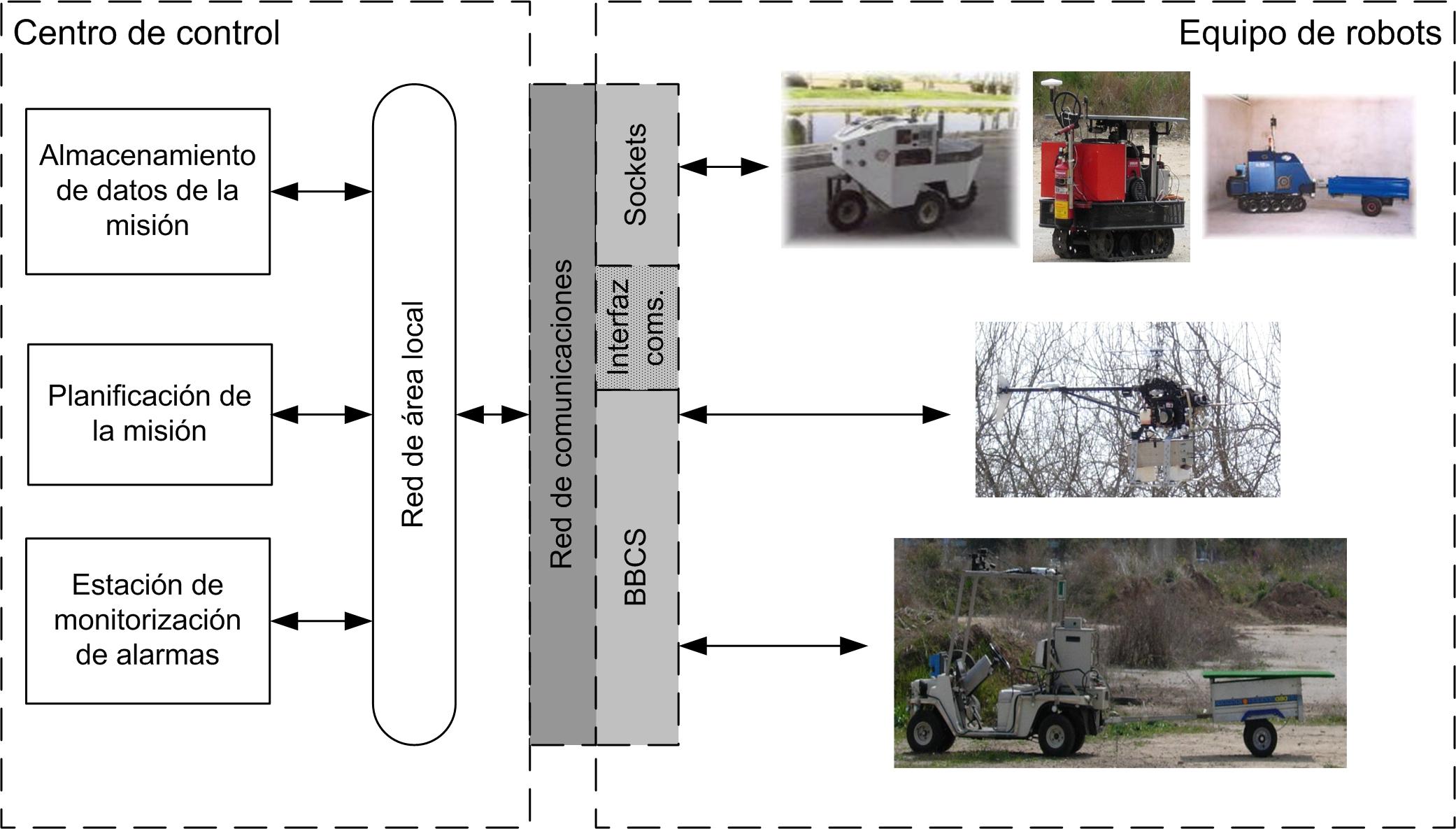
Coordinación de robots móviles aéreos y terrestres |
|
|
|
|
Objetivos |
1) Desarrollo de un helicóptero robótico y su integración con un robot terrestre, resultado de un proyecto previo, así como de nuevos métodos de navegación (autónoma y teleoperada) y percepción en el sistema integrado. 2) Desarrollo de técnicas de teleoperación y control coordinado de múltiples robots resultados de proyectos en previos. 3) Desarrollo de técnicas de control del helicóptero robótico empleando para ello resultados de la investigación previa en control de sistemas inestables subactuados. 4) Desarrollo de una arquitectura para la cooperación de robots aéreos y terrestres (arquitectura CROMAT). |
|